Prilikom modeliranja sklopova u okruženju Sklopovi (Assembly) svakoj komponenti je potrebno ograničiti stepene slobode kretanja pomoću alatki za spojeve .
Da bi početnici lakše shvatili gornju rečenicu, prvo ću objasniti nekoliko pojmova.
Kinematički par: Kinematički par predstavlja sistem od dva međusobno povezana dela sklopa.
Broj stepeni slobode: Broj stepeni slobode je broj slobodnih, odnosno mogućih nezavisnih kretanja koji su potrebni da bi se jednoznačno odredio položaj nekog tela, tj. komponente (deo ili podsklop) u sklopu. Svako telo u prostoru može da se kreće na 6 nezavisnih načina: 3 translacije (duž osa x, y, z) i 3 rotacije (oko osa x, y, z). Iz prethodne rečenice sledi da je položaj svakog dela jednoznačno određen pomoću 6 nezavisnih parametara. Tri parametra određuju položaj dela na koordinatnim osama x, y i z, a tri parametra određuju koliko je telo zaokrenuto oko osa x, y i z.
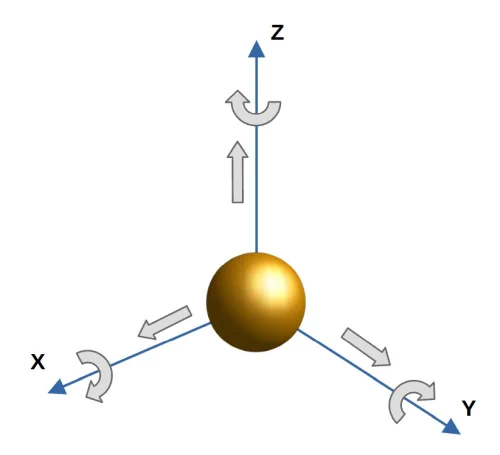
Stepeni slobode kretanja
Klase kinematičkih parova: Tela unutar kinematičkog para su na određeni način međusobno povezana što znači da jedno drugome ograničavaju određene stepene slobode kretanja. U zavisnosti od broja ograničenih stepena slobode kinematičke parove delimo na klase. Svakoj klasi odgovara određeni broj ograničenih stepeni slobode kretanja između delova, t.j. komponenti sklopa.
U sledećoj tabeli možete videti primere kinematičkih parova raspoređenih u klase.
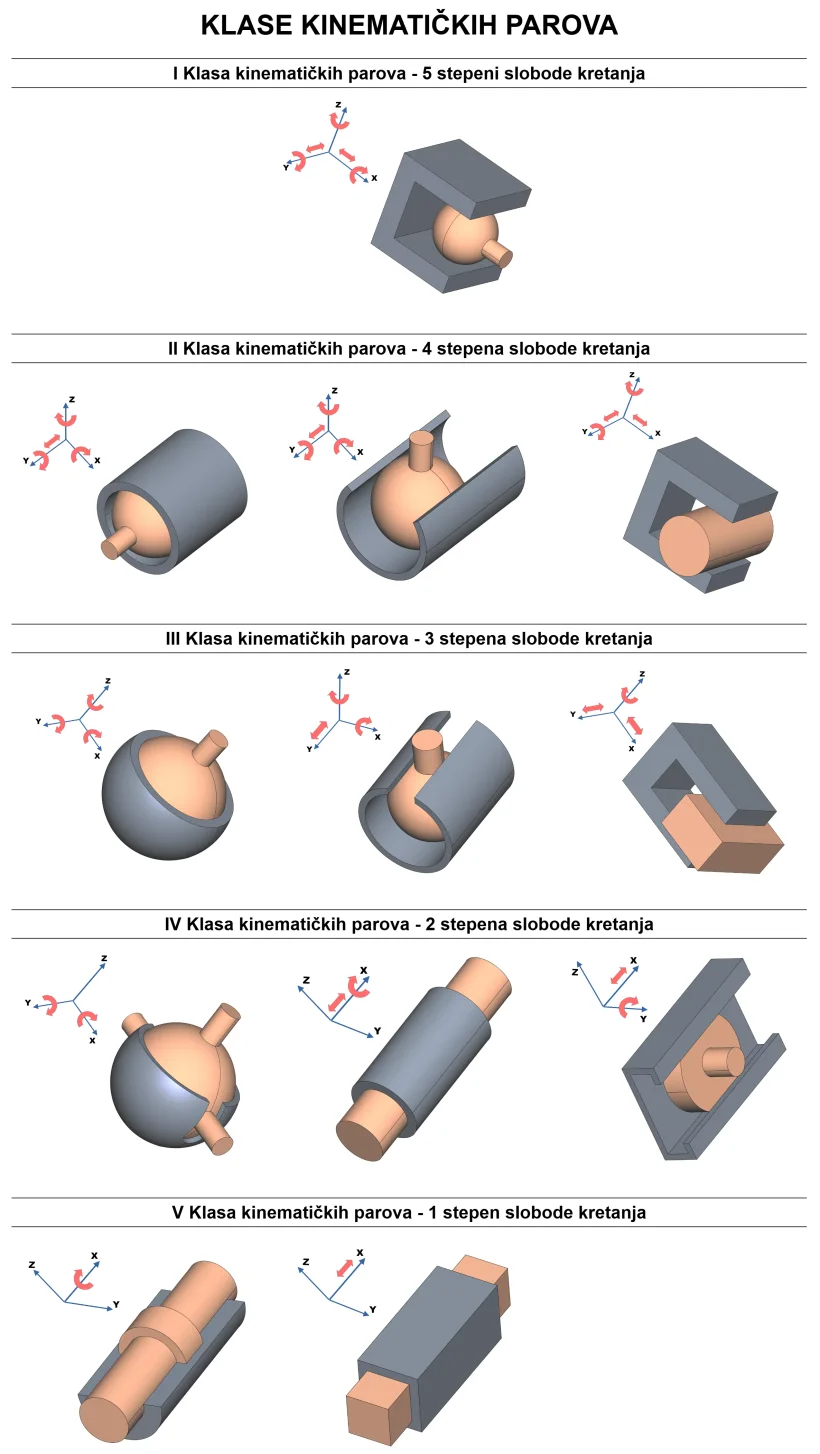
Klase kinematičkih parova
Neki kinematički parovi imaju i opisna imena, tako na primer, kinematički par pete klase koji dozvoljava samo jednu rotaciju zove se rotacioni par ili rotacioni zglob, par koji dozvoljava samo jednu translaciju zove se translatorni par ili translatorni zglob, a par koji dozvoljava samo tri rotacije zove se kuglasti par ili kuglasti zglob.
Primer: Pogledajmo kinematski par koji se sastoji od valjka unutar cevi. Valjak se unutar cevi može pomerati po svojoj uzdužnoj osi ili se može rotirati oko nje. Valjak može da ima samo 2 vrste kretanja, znači da ima 2 stepena slobode kretanja (kretanje valjka se može opisati sa 2 nezavisna parametra)
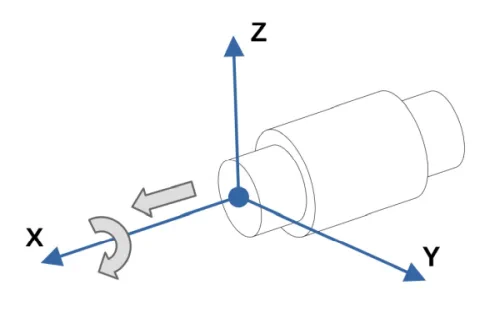
Cilindrični par valjka i cevi
Drugim rečima cev ograničava stepene slobode kretanja valjka i među njima postoji spoj koji odgovara 4 klasi kinematičkih parova. Opisno ime za ovu vrstu spoja je cilindrični par. Spojevi u okruženju Sklopovi (Assembly) imaju sličnu logiku kao klase kinematičkih parova, samo se u okruženju koristi termin spoj, a ne par ili zglob.
Prilikom prevođenja okruženja Sklopovi pojavila se dilema kako nazvati termin ograničavanja stepene slobode. Na raspolaganju su bili pojmovi ograničenje, veza, spoj, kinematički par (ili skraćeno par) i kinematički zglob (skraćeno zglob). Svaki od pojmova je imao svoje prednosti i mane, ali na kraju zbog svoje univerzalnosti izabran je pojam spoj. To je pojam iz mašinstva koji obuhvata veliki broj vrsti veza među delovima, nije još upotrebljen u ostalim okruženjima FreeCAD-a, a jednostavan je i jasan čak i teoretski slabije potkovanim korisnicima FreeCAD-a.
Za sada unutar okruženja Sklopovi postoje sledeći načini spajanja komponenti:
Alatke za kinematičke spojeve - Ove alatke oduzimaju stepene slobode kretanja na isti ili sličan način kao klase kinematičkih parova
 Napravi čvrsti spoj (Create a Fixed Joint) - Sprečava bilo kakvo kretanje ili rotaciju
Napravi čvrsti spoj (Create a Fixed Joint) - Sprečava bilo kakvo kretanje ili rotaciju Napravi rotacioni spoj (Create Revolute Joint) - Dozvoljava rotaciju oko jedne ose (Kinematski par V klase)
Napravi rotacioni spoj (Create Revolute Joint) - Dozvoljava rotaciju oko jedne ose (Kinematski par V klase) Napravi cilindrični spoj (Create Cylindrical Joint) - Dozvoljava rotaciju oko jedne ose i translaciju po istoj osi (Kinematski par IV klase)
Napravi cilindrični spoj (Create Cylindrical Joint) - Dozvoljava rotaciju oko jedne ose i translaciju po istoj osi (Kinematski par IV klase) Napravi translatorni spoj (Create slider joint) - Dozvoljava jednu translaciju (Kinematski par V klase).
Napravi translatorni spoj (Create slider joint) - Dozvoljava jednu translaciju (Kinematski par V klase). Napravi kuglasti spoj (Create Ball Joint) - Dozvoljava rotaciju oko sve tri ose (Kinematski par III klase)
Napravi kuglasti spoj (Create Ball Joint) - Dozvoljava rotaciju oko sve tri ose (Kinematski par III klase) Napravi ravanski spoj (Create Distance Joint) - Dozvoljava rotaciju oko jedne ose i translaciju po dve ose (kinematski par III klase)
Napravi ravanski spoj (Create Distance Joint) - Dozvoljava rotaciju oko jedne ose i translaciju po dve ose (kinematski par III klase) Napravi paralelni spoj (Create Parallel Joint)
Napravi paralelni spoj (Create Parallel Joint) Napravi upravni spoj (Create Perpendicular Joint)
Napravi upravni spoj (Create Perpendicular Joint) Napravi ugaoni spoj (Create Angle Joint)
Napravi ugaoni spoj (Create Angle Joint)
Alatke za prenosne spojeve – Ove alatke spajaju komponente na isti način kao što su spojeni mašinski elementi koji služe za prenos snage.
 Napravi navojni spoj (Create screw joint)
Napravi navojni spoj (Create screw joint) Napravi prenos sa zupačastom letvom (Create rack and pinion joint)
Napravi prenos sa zupačastom letvom (Create rack and pinion joint) Napravi zupčasti prenos (Create Gears Joint)
Napravi zupčasti prenos (Create Gears Joint) Napravi remeni prenos (Create belt joint)
Napravi remeni prenos (Create belt joint)