Kod svih raketa, izuzev kod manjih projektila koji spadaju u taktičko naoružanje, postoji uređaj za stabilizaciju i upravljanje. Ovo je jedan od najsloženijih mehanizama u raketi.
Obično se govori da su to »elektronski mozgovi«. Međutim, to nije samo elektronski uređaj već kombinacija elektronike, elektrotehnike, optike i mehanike. Do sada su primenjivana dva sistema za stabilizaciju raketa i to: astronomski - zvezdani i inercijalni. Kod prvog sistema osnovni elemenat jesu fotoćelije koje pri svakom skretanju rakete sa određenog pravca (prema izabranim zvezdama nekretnicama) uključuju u rad mehanizam za pokretanje kormila. Ovaj sistem može da funkcioniše samo u uslovima dobre vidljivosti ili iznad oblaka. Zbog toga je u većoj primeni inercijalni sistem za stabilizaciju sa žiroskopom kao osnovnim elementom.
Žiroskop nije nikakva tehnička novost. Njega je još pre sto godina konstruisao francuski fizičar Fuko, radi posmatranja okretanja Zemlje. Glavni deo žiroskopa jeste masivni rotor koji ima tri stepena okretaja: oko prve osovine XX, oko osovine YY i ZZ (slika 1).
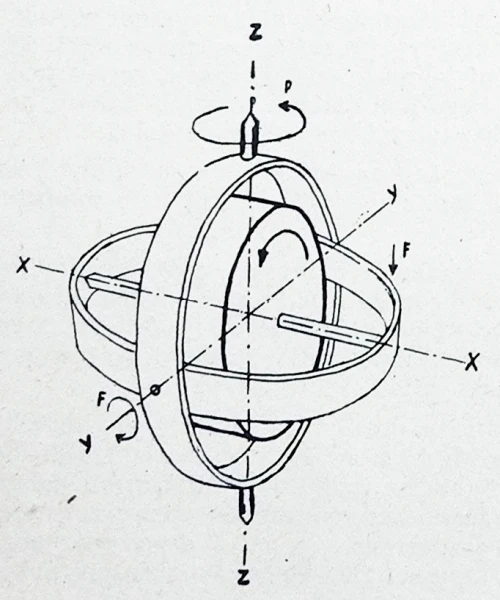
Slika 1 – Žiroskop
Napomena: U originalnom tekstu su slike pogrešno numerisane i nedostaje jedna slika. Ovaj tekst je isti kao original.
Pri okretanju žiroskop dobije naročitu stabilnost, pri čemu njegova glavna osovina XX teži da zadrži nepromenjen položaj u prostoru. Stabilnost je veća ukoliko su momenat inercije i brzine obrtanja rotora veći. Kod savremenih uređaja rotor žiroskopa se pokreće pomoću malih elektromotora sa brzinom do 30.000 ob/min. Pored ove osobine žiroskop ima još jednu, naime, kada pri radu na njega deluje neka sila (F) da ga pokrene oko osovine YY, on neće vršiti skretanje oko te osovine, već oko ZZ, i obratno, ako sila deluje oko osovine ZZ on će vršiti skretanje oko osovine YY. To naročito skretanje pod uglom od 90 stepeni od smera dejstva sile zove se precesija (P). Samo u toku jednog veka svoga postojanja žiroskop je našao veliku primenu u tehnici, a naročito za održavanje stabilnosti. Izvestan broj avionskih instrumenata radi na principu žiroskopa. Kod torpeda žiroskop služi za održavanje pravca od izbacivanja iz podmornice do cilja. Kod nekih tenkova, pri kretanju po neravnom terenu, žiroskop održava top u vodoravnom položaju da bi se moglo lakše i preciznije gađati. Avionski žiro-nišan omogućava preciznije gađanje u vazduhu. Svi moderni putnički i transportni avioni imaju uređaj nazvan »automatski pilot« čiji je osnovni elemenat žiroskop. Kad njega uključi u rad pilot se može odmoriti i prošetati po avionu bez bojazni da će avion skrenuti sa usmerenog pravca. Inercijalni sistem za stabilizaciju projektila predstavlja dalje usavršavanje avionskog automatskog pilota.
Za vreme leta projektila potrebno je održavati stabilizaciju oko njegove poprečne ose Y'Y', vertikalne X'X' i uzdužne Z'Z' (slika 2).
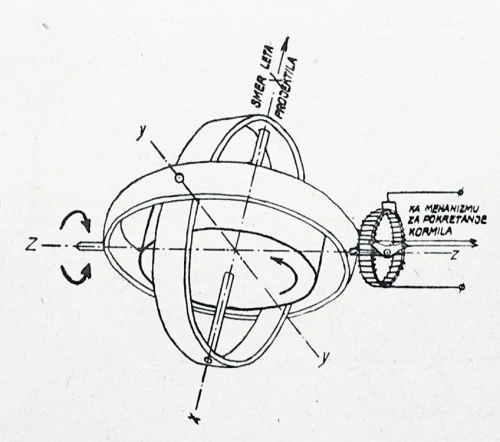
Slika 2 - Žiroskop automata za stabilizaciju ugla gađanja
Da bi se to postiglo uređaj ima dva žiroskopa, od kojih jedan održava stabilizaciju oko poprečne a drugi oko vertikalne i uzdužne ose. Prvi žiroskop je ugrađen tako da mu je treća osovina ZZ paralelna poprečnoj osi projektila (slika 3).
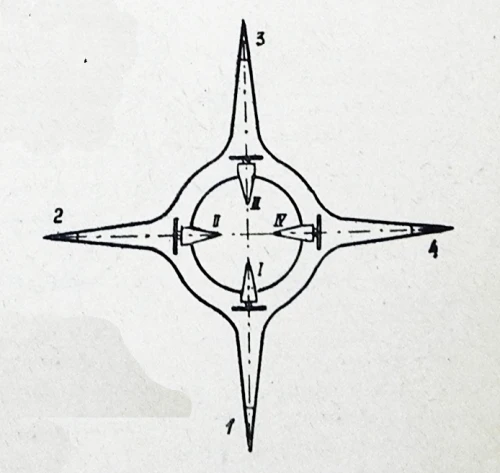
Slika 3 - Rep sa mlaznikom rakete: I-IV gasna kormila; 1-4 vazdušna kormila
Oko jednog kraja te osovine nalazi se vrlo osetljiv otpornik-potenciometar. Njegovi klizni kontakti pričvršćeni su za osovinu žiroskopa. Oni će kliziti po potenciometru pri okretanju žiroskopa oko osovine ZZ, ili pri okretanju potenciometra oko te osovine. Potenciometar je provodnicima spojen za električni ili elektro-hidraulični mehanizam za pokretanje kormila projektila. Završnu ulogu u upravljanju projektilom igraju četiri gasna kormila koja se nalaze u mlazniku rakete (slika 4).
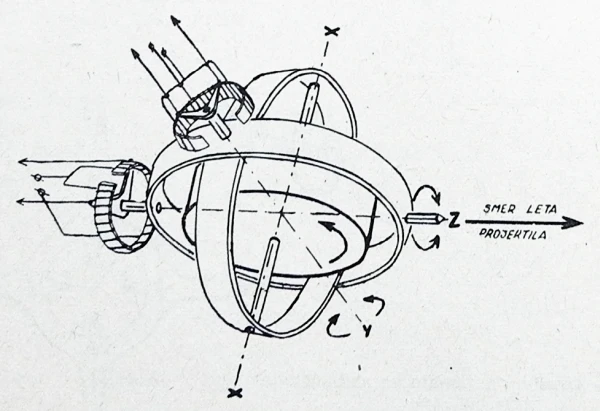
Slika 4 - Žiroskop automata za stabilizaciju projektila oko uzdužne i vertikalne ose
Vazdušna kormila pomažu samo pri uzletanju projektila. Prvi žiroskop komanduje sinhronim pokretima kormila II i IV. Do sada opisani delovi predstavljaju automat stabilizacije ugla gađanja. Rad automata se sastoji u otklanjanju nepoželjnog skretanja projektila oko poprečne ose Y'Y', zajedno sa njim skreće i potenciometar u odnosu na nepokretni stabilni žiroskop. Na taj način klizni kontakti uključuju u rad mehanizam za pokretanje kormila II i IV; njihovim otklonom menja se smer gasnih strujnica i projektil se vraća na prvobitni ugao gađanja. Ovakvim radom automat održava stabilnim određeni ugao. Međutim. za vreme leta projektila taj ugao treba menjati. To se postiže upravljanjem sa zemlje. Pomoću otpremnog radio-uređaja šalju se određeni signali koje prima antena na projektilu. Signali dalje prolaze kroz više elektronskih pojačavača i na kraju dobiju potrebnu snagu za rad jednog elektromagneta, koji preko odgovarajućeg mehanizma pokreće potenciometar na željeni ugao. Pri tome klizni kontakti uključuju u rad mehanizam za pokretanje kormila usled čega projektil dobije novi ugao leta. Sada žiroskop, na ranije opisan način, održava taj novi ugao stabilnim.
Drugi žiroskop održava stabilizaciju projektila oko vertikalne ose X'X' i oko uzdužne Z'Z'. On je ugrađen u projektil tako da mu je druga osovina YY paralelna vertikalnoj osi projektila X'X', a treća osovina ZZ paralelna uzdužnoj osi projektila Z'Z' (slika 5). Žiroskop ima dva potenciometra: jedan oko osovine ZZ, a drugi oko YY. Oni su spojeni svaki za svoj mehanizam za pokretanje kormila I i III. Pri radu, žiroskop sa kliznim kontaktima održava nepromenjen - stabilan položaj.
Ako projektil sa odgovarajućim potenciometrom skrene oko vertikalne ose X'X' (sa kursa), dolazi do uključivanja mehanizma i sinhronog pokretanja kormila I i III, usled čega se projektil vraća na prvobitni kurs. Kod nekih projektila, obično balističkih sa velikim dometom, kurs je unapred određen i ostaje stalan za sve vreme leta. U tom slučaju ovaj automat nema uređaja za upravljanje sa zemlje, dok se kod manjih projektila za protivavionsku odbranu vrši upravljanje sa Zemlje na opisan način, ili samonavođenjem.
Ako projektil počne vršiti izvesnu rotaciju oko svoje uzdužne ose Z'Z', potenciometar na trećoj osovini žiroskopa ZZ uključuje u rad drugi mehanizam za pokretanje kormila I i III. U ovom slučaju kormila se otklanjaju u suprotne strane, usled čega se stvara okretni momenat gasa i projektil se vraća u prvobitni položaj. Upravljanje skretanja projektila oko uzdužne ose nikad se ne vrši, jer za sve vreme aktivnog leta projektil u tom smislu mora biti stabilan.
Neki balistički projektili velikog dometa imaju i treći žiroskop. On je osnovni elemenat mehanizma intregratora. Ovaj uređaj služi za automatsko isključivanje motora projektila kada on dostigne potrebnu brzinu na kraju aktivnog dela svoje putanje. Na tom delu putanje projektil se putem vođenja sa Zemlje dovodi na potreban ugao gađanja. Ali pri jednom istom uglu gađanja projektil će sa manjom ili većom brzinom imati manji ili veći domet. Kod ove kategorije projektila regulisanje dometa je neobično važno i ono se uglavnom vrši isključivanjem motora pri brzini koja je unapred proračunata za konkretni cilj. Na primer: za obletanje oko Meseca i povratak na Zemlju potrebno je da raketa ima brzinu od 0,99 do 1,0001 V2 - druge kosmičke brzine. Ako bi brzina bila manja od 0,99 V2, raketa bi pala na Mesec, dok bi pri većoj brzini od 1,0001 V2 izvršila izvesno skretanje pod dejstvom mesečeve teže i produžila u kosmos ne vrativši se na Zemlju. Merenje brzine projektila i isključivanje motora u datom trenutku vrši se na više načina, od kojih je najjednostavniji pomoću žiroskopskog integratora.
Žiroskop integrator karakterističan je po tome što se njegove osovine XX, YY i ZZ ne seku u jednoj tački i što se centar težišta ne nalazi u toj tački presecanja (slika 6).
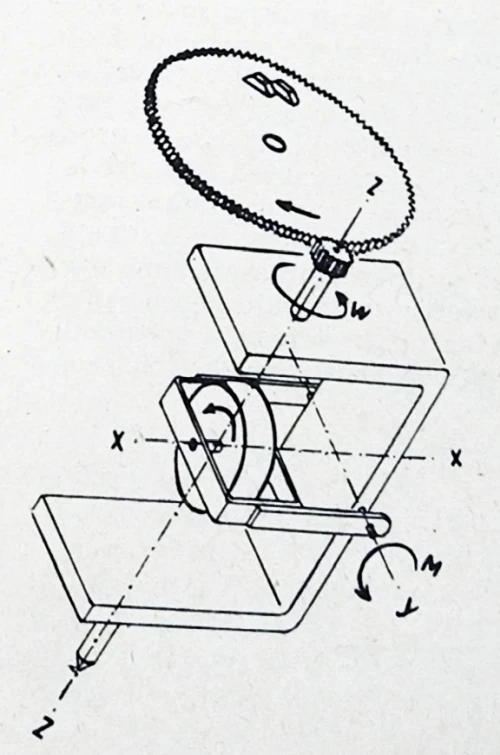
Slika 5 - Žiroskop integratora
To je neuravnoteženi žiroskop. Druga osovina YY prostire se izvan tačke presecanja osovina XX i ZZ, tako da rotor žiroskopa sa svojim ramom visi oko nje. Pri radu, usled momenta težine koji deluje oko osovine YY, žiroskop vrši precesiju oko osovine ZZ i pokreće disk sa zupcima za isključivanje motora iz rada. Ugaona brzina precesije (W) zavisi zavisi upravno srazmerno od momenta težine (M) i obrnuto srazmerno od momenta inercije (C) i ugaone brzine rotora (V):
W = M / (C * V)
Veličine C i V su konstantne, a M i brzina precesije W se povećavaju sa ubrzanjem projektila. Vreme postizanja proračunate brzine za gađanje konkretnog cilja zavisi od ubrzanja projektila na aktivnom delu putanje. Isto tako od ubrzanja zavisi brzina precesije žiroskopa i momenat kad će integrator isključiti motor iz rada. Ova dva vremena treba da se poklapaju. Zato se prilikom priprema projektila za start vrši podešavanje integratora pomoću naročite skale.
Uređajima za stabilizaciju i upravljanje pridaje se naročiti značaj u raketnoj tehnici, jer od sigurnosti i tačnosti tog mehanizma zavisi da li će biti postignut željeni cilj pri svakom lansiranju. Radi toga intenzivno se radi na usavršavanju svih uređaja tih elemenata, a naročito žiroskopa kao osnovnog elementa. U tim nastojanjima napori stručnjaka su usmereni na otklanjanje trenja u osovinama žiroskopa, jer to trenje predstavlja silu koja izaziva neželjenu precesiju i greške koje se negativno odražavaju na preciznost celog uređaja. Tako je konstruisan »ploveći žiroskop, kod koga je trenje u osovinama YY i ZZ svedeno na minimum. Ovakvi žiroskopi su već više godina u primeni, a najnoviju konstrukciju predstavlja idealno slobodni, elektromagnetni žiroskop. Kod njega ne samo da je potpuno otklonjeno trenje u sve tri osovine već ne postoji ni vazdušni otpor sredine u kojoj se vrši rotacija. Rotirajući deo ovog žiroskopa jeste mala kuglica koja se nalazi u zatvorenoj bezvazdušnoj komori. Pri proticanju električne struje kuglica postaje elektromagnet usled čega lebdi i vrši rotaciju na površini drugog magnetnog polja. Iz ovog kratkog opisa vidi se da savremeni žiroskopi po obliku nisu nimalo slični klasičnim žiroskopima sa zamajcem i ramovima kakvi su prikazani na crtežima ovog članka. Međutim, jedni i drugi prilikom rotacije zadržavaju nepromenjen položaj u prostoru i ta je osobina iskorišćena za rad automata pri stabilizaciji i upravljanju raketa kao i za rad drugih instrumenata u astronautici, vazduhoplovstvu i pomorstvu.
Autor: Javni službenik MOMČILO STOJKOVIĆ
Izvor: Vazduhoplovni glasnik, 60-te godine prošlog veka