Inercijalni sistem navigacije predstavlja metod automatskog ili poluautomatskog upravljanja i vođenja na cilj vazduhoplova, vodenog projektila i tome slično.
Glavna karakteristika i prednost ovoga sistema je u tome što je on potpuno autonoman, tj. nezavisan od zemaljskih uređaja. Oprema inercijalnog sistema navigacije koja se nalazi na vazduhoplovu omogućava vođenje istog na cilj bez ikakve veze sa zemljom ili bilo kakve orijentacije po nebeskim telima, već za svoj rad koristi isključivo Njutnove zakone kretanja koji važe za apsolutni (inercijalni) prostor. Prema tome, oprema ovog sistema omogućava merenje rastojanja i pravca, ne zahtevajući za svoj rad optičke, magnetne, radio ili bilo kakve veze sa zemljom ili drugim nebeskim telima.
Prednosti inercijalnog sistema navigacije u odnosu na ostale sisteme su:
neosetljivost na ometanje,
autonomnost - nezavisnost od zemaljskih uređaja,
nema emitovanja radio-signala, što ne daje mogućnost neprijatelju da otkrije vazduhoplov ili projektil.
U zavisnosti od namene, zahtevane tačnosti i potrebnog vremena za izvršenje postavljenog zadatka, težina opreme ovog sistema može da se kreće u granicama od 34-900 kg.
Inercijalni sistem navigacije sastoji se iz:
žiroskopa,
akcelerometara,
računskih uređaja,
servo-mehanizama.
Svi ovi uređaji u ovom ili onom obliku, široko se koriste na savremenim vazduhoplovima. Ipak, pri korišćenju ovih uređaja u ovom sistemu postavljaju se znatno složeniji zahtevi. Kao osnovni zahtev postavlja se visoka tačnost. Tačnost izrade, regulisanje, zadržavanje zadanih parametara kod instrumenata je toliko velika da se jedino može uporediti sa tačnošću preciznih laboratorijskih instrumenata. Uporedo sa tim zahtevima oprema ovog sistema mora raditi i u uslovima široke promene temperature okolne sredine, vibracija i udara koji su obavezni pratioci veoma brzih vazduhoplova i projektila.
U osnovi, svaki inercijalni sistem navigacije predstavlja takav uređaj koji izračunava put pređen od strane vazduhoplova sa polazne do željene tačke. Za rad sistema neophodno je znati geografski položaj (geografsku dužinu i geografsku, širinu, ili ekvivalentne podatke) polazne i željene tačke stizanja. Ovi podaci se moraju na odgovarajući način uneti u sistem. Inercijalni sistem navigacije nije sposoban da navede onaj objekat (vazduhoplov, projektil) koji on vodi na pokretni cilj, ako se na krajnjoj etapi navođenja ne uključi neki drugi uređaj automatskog traženja cilja, koji radi na drugom principu (radar, toplotni uređaj i slično).
Kada je snabdeven podacima o polaznom položaju (poziciji) vođenog objekta (vazduhoplova, projektila), kao i o položaju željene tačke stizanja, inercijalni sistem navigacije je sposoban da određuje sledeće podatke:
geografski položaj objekta (vazduhoplova, projektila) koji se kreće,
brzinu toga objekta u odnosu na zemlju,
pređeno rastojanje od polazne tačke i preostalo rastojanje do željene tačke stizanja,
pravac leta prema željenoj tački,
položaj vazduhoplova ili projektila u odnosu na Zemljin horizont.
Tek kada se raspolaže sa ovim podacima, koji se šalju u vidu jednog signala na uređaj namenjen za upravljanje (npr. na auto-pilot), moguće je automatski navoditi letilicu na željeni cilj.
Pred inercijalni sistem navigacije se postavljaju sledeći zahtevi:
da radi na bilo kom mestu Zemljine kugle,
da radi u svako doba i pod svim meteo-uslovima,
da je apsolutno neosetljiv na bilo kakve smetnje (slučajne ili organizovane),
da je tačan i pouzdan u radu,
da ima mogućnost neograničenog otklanjanja od planiranog kursa,
da obezbeđuje upravljanje letilicom na bilo kojoj visini,
da omogućuje precizno upravljanje po bilo kojem izabranom kursu, bez obzira da li je određen prethodno ili se određuje u toku leta.
Ukoliko se raspolaže takvim sistemom, onda nema potrebe za instaliranjem komplikovanih uređaja, kako u tački polaska tako po maršruti leta i u tački stizanja. Jedina neophodna zemaljska oprema su instrumenti za određivanje geografskih koordinata polazne tačke, i podaci o koordinatama željenog cilja.
Inercijalni sistem navigacije ne treba mešati sa zvezdanim sistemom (astro-navigacijom) kao ni sa automatskim računskim uređajem (autonavigatorom) koji izračunava put. Prednost inercijalnog sistema navigacije pred astronavigacijom ogleda se u tome što je pri letu na malim visinama i u lošim meteo-uslovima mogućnost upotrebe zvezdanog sistema ograničena, dok tog ograničenja pri upotrebi inercijalnog sistema nema. Prednost inercijalnog sistema navigacije nad računskim sistemom je u tome što za rad računara treba raspolagati prijemnikom vazdušnog pritiska, čija je upotreba kod veoma brzih vazduhoplova, a pogotovo projektila, vezana sa nizom poteškoća. Čak i kod onih računara koji koriste Doplerov efekat pomoću radara, znači koji imaju spoljnje zračenje što je vezano sa opasnošću organizovanih smetnji od strane neprijatelja, prednost inercijalnog sistema navigacije je očigledna jer se koristi sasvim drugi metod određivanja položaja objekta, pa se ne ukazuje potreba za dobijanjem podataka o kretanju objekta u odnosu na zvezde ili zemlju, ni pomoću optičkih, ni radarskih ni bilo kakvih drugih sredstava.
Princip rada inercijalnog sistema navigacije
Princip rada svakog inercijalnog sistema se sastoji u merenju ubrzanja tela koje se kreće. Poznato je da je ubrzanje jedinstvena veličina koja karakteriše kretanje tela u prostoru, a koja se može izmeriti unutar toga tela. Neprekidnim merenjem ubrzanja mogu se dobiti polazni podaci za određivanje brzine i puta. Ubrzanja objekta koji se kreće mere se akcelerometrima.
Brzina objekta predstavlja u stvari integral od ubrzanja po vremenu, a pređeno rastojanje predstavlja integral od brzine po vremenu. Na taj način, rastojanje se može izraziti kao dvostruki integral od ubrzanja po vremenu.
U cilju boljeg objašnjenja napred iznetih postavki, koristićemo se sledećim primerom: Neka imamo, npr. električni železnički vagon koji stoji na pravolinijskom delu pruge. Opremimo ga akcelerometrom koji može da meri ubrzanje u pravcu kretanja i sa dva integratora 5 i 6, kao što je to prikazano na slici 1.
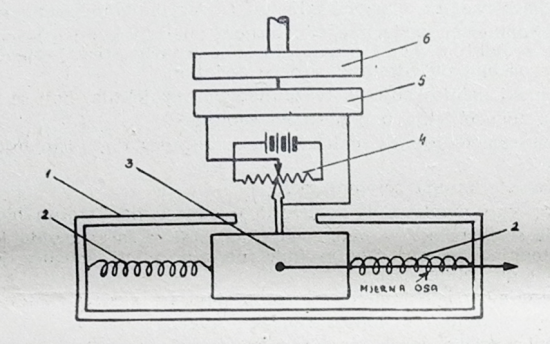
Slika 1- Šema akcelerometra sa integratorom:
1 - telo akcelerometra; 2 - opruge; 3 - masa; 4 - potenciometar; 5 - prvi integrator; 6 - drugi integrator
Na izlaznoj osovini drugog integratora, koja se zaokreće za ugao proporcionalan pređenom rastojanju, priključen je kontaktni uređaj, čiji je jedan kontakt vezan sa osovinom integratora a drugi sa telom instrumenta. Ovaj drugi kontakt se okreće u odnosu na prvi za ugao koji odgovara zadanom putu vagona.
Pri puštanju vagona u pokret akcelerometar će odmah početi da meri ubrzanja a izlazna osovina drugog integratora zaokretaće se za ugao koji je proporcionalan pređenom putu. Čim vagon pređe već ranije određeni put, kontaktni uređaj će isključiti motore, a to znači zakočiti vagon. Na taj način vagon će doći do željenog cilja upravljajući se isključivo uređajima postavljenim unutar vagona. Spoljašnji uslovi od kojih zavisi brzina vagona mogu biti različiti (npr. čeoni vetar, promena napona u mreži i sl.), ali nijedan od njih neće uticati na zaustavljanje vagona u zadanoj tački puta. Primer ilustruje najprostiji inercijalni sistem navicije koji ima samo jedan stepen slobode. On nam istovremeno pokazuje da je praktično moguće ostvariti dolazak vođenog objekta u zadanu tačku pomoću prethodnog postavljanja uređaja na zadano rastojanje, pri čemu rad uređaja uopšte nije vezan sa neposrednim merenjem brzine pomoću bilo kakvog kontaktiranja sa šinama ili drugim spoljnim predmetima.
Merenje, tj. određivanje pređenog rastojanja ovde se izvodi pomoću autonomne opreme, montirane na objektu koji se kreće a koja nije u vezi sa okolnom sredinom. Taj princip merenja i integriranja ubrzanja predstavlja glavni princip koji koriste savremeni inercijalni sistemi navigacije.
Realizacija inercijalnog sistema navigacije
U elementarnom primeru inercijalnog upravljanja objektom koji se kreće po pravoj liniji, videli smo da ga je dovoljno opremiti samo sa jednim akcelerometrom za merenje ubrzanja koje deluje u pravcu kretanja tog objekta. Međutim, ukoliko je potrebno ostvariti inercijalno upravljanje objektom koji se kreće po dvema uzajamno vertikalnim osama, tada su potrebna dva akcelerometra i dva para integratora. U ovom slučaju svaki akcelerometar sa svojim parom integratora upravlja kretanjem objekta duž svojih osa.
Ako predstavimo da je inercijalni sistem navigacije namenjen za korišćenje na vazduhoplovima ili projektilima koji u krajnjem slučaju imaju šest stepeni slobode, i koji su sposobni da lete u raznim položajima, tada se ukazuje potreba za dopunskim instrumentima u vezi sa izborom principa rada, izradom neophodnih čvorova sistema i obezbeđenjem vrlo visoke tačnosti njihovog rada.
Vazduhoplovni inercijalni sistem navigacije treba da ima dva-tri akcelerometra za određivanje ubrzanja vazduhoplova (projektila) sa po dve-tri uzajamno vertikalne ose (npr., N-S, E-W, gore-dole). Izlazni signali akcelerometra mogu se integrirati posebnim integratorima, ili u posebnim slučajevima pomoću integratora koji predstavljaju sastavne delove akcelerometara.
Razmotrićemo inercijalni sistem sa dva akcelerometra i to:
jedan, koji meri ubrzanja Vn u pravcu N-S,
drugi, koji meri ubrzanja Ve u pravcu E-W.
Severna i istočna ubrzanja se smatraju pozitivnim. Da bi akcelerometri merili konkretna ubrzanja, oni se moraju montirati na horizontalno stabilizovanoj platformi, koja je fiksno orijentisana u odnosu na liniju N-S. Merna osa jednog akcelerometra postavlja se duž linije N-S, a druga duž linije E-W. Prvi akcelerometar ćemo zvati severni, a drugi - istočni. Pošto akcelerometri nisu u stanju da razlikuju ubrzanja objekta koji se kreće (a koja bi oni baš morali meriti) od ubrzanja koja nastaju pod uticajem sile Zemljine teže, to čak i neznatno otklanjanje platforme sa akcelerometrima od horizontalnog položaja može izazvati ozbiljne greške. Isto tako se strogo mora održavati i odgovarajuća orijentacija platforme sa akcelerometrima u odnosu na ose N-S i E-W, ili u odnosu na drugi izabrani koordinatni sistem i to polazni koordinatni sistem.
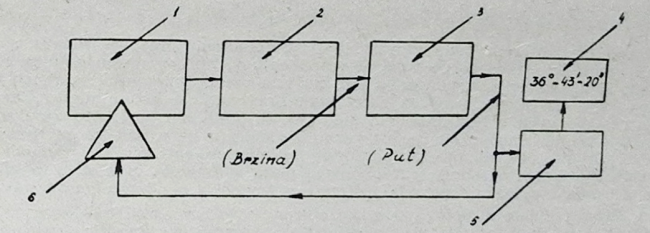
Slika 2 - Blok šema čisto inercijalnog sistema navigacije:
1- akcelerometar; 2 - prvi integrator; 3 - drugi integrator; 4 - pokazivač položaja; 5 - računar; 6 - stabilizovana platforma
Rastojanje i potreban pravac do željenog cilja izračunavaju se pomoću metoda sferne trigonometrije, tj. pomoću automatskog računara koji dobija signale od integratora ubrzanja. Osim toga, inercijalni sistem navigacije određuje neprekidno i automatski i uglove ψ, ϑ i γ koji pokazuju položaj objekta u odnosu na horizont i meridijan Zemlje. Potreba za poznavanjem ovih uglova, uporedo sa registrovanjem rastojanja pravca do željenog cilja, neophodna je za automatsko upravljanje objektom pomoću auto-pilota.
Iz iznesenog se jasno vidi da je za praktično ostvarenje inercijalnog sistema navigacije neophodno potrebno, pre svega, imati stabilizovanu platformu oko 3 ose. Ta platforma mora sa velikom tačnošću da zadržava svoj horizontalni položaj kao i svoju strogu orijentaciju po pravcu N-S.
Pretpostavimo da je vazduhoplov poleteo na ekvatoru (slika 3) i da je na njemu stabilizovana platforma (2) sa akcelerometrima postavljena pri poletanju horizontalno.
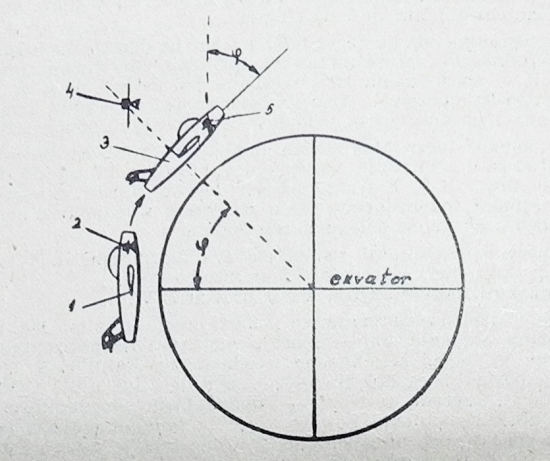
Slika 3 - Platforma sa akcelerometrima na vazduhoplovu: 1- vazduhoplov u tački poletanja; 2 - platforma sa akcelerometrima; 3 – položaj vazduhoplova u odnosu na zemlju posle dolaska duž meridijana u tačku udaljenu za ugao φ od tačke poletanja; 4 - položaj platforme stabilizovane u inercijalnom prostoru; 5 - položaj horizontalno stabilizovane platforme
Ako ta platforma bude zadržavala u inercijalnom prostoru zadani položaj za sve vreme leta, tada će po dolasku vazduhoplova, npr., u mesto koje se nalazi za ugao φ duž meridijana, platforma biti nagnuta prema horizontu za taj isti ugao. Prema tome, da bi platforma sa akcelerometrima na bilo kojem mestu Zemljine kugle ostajala uvek u horizontalnom položaju, tj. paralelno horizontu Zemlje, ona mora biti stabilizovana u odnosu na ravan horizont, a ne u odnosu na inercijalni prostor. Drugim rečima, položaj platforme sa akcelerometrima pri promeni geografskih koordinata od strane vazduhoplova mora se, takođe, menjati i to tako da bi ona ostajala uvek horizontalna i strogo orijentisana u odnosu na pravac N-S.
Sličan problem se pojavljuje i kod običnog avio-horizonta, kod kojeg se mora održavati vertikalni položaj glavne ose »X« u odnosu na Zemljin horizont, bez obzira na kojem se mestu vazduhoplov nalazio.
Kod inercijalnog sistema navigacije ako se platforma otkloni od vertikale samo za 1 minut, onda će uticaj projekcije ubrzanja usled Zemljine teže izazvati grešku u određivanju rastojanja na kraju jednog sata leta za 18,5 km.
Da bi se otklonio taj nedostatak, postoje dva osnovna načina koji obezbeđuju pravce mernih osa akcelerometara kakvi se zahtevaju, a koji se najviše i primenjuju u inercijalnim sistemima navigacije.
Prvi način se sastoji u tome što se akcelerometri (8 i 9 slika 4) postavljaju na platformu (7), koja je opet ugrađena na ram (6). Ovaj ram je vezan sa žirostabilizovanom platformom (1), koja je strogo orijentisana u inercijalnom prostoru, tako da joj je osa ξ usmerena paralelno osi dnevnog okretanja Zemlje. Radi bolje preglednosti na slici 4, žirostabilizovana platforma (1) je prikazana bez kardanskog klatna u kome je ona baš ugrađena. Takav način podržavanja horizontalnosti platforme nazvaćemo »integralnom korekcijom«. Na taj način »integralna korekcija« nam omogućuje održavanje horizontalnosti platforme i pri kretanju vazduhoplova sa ubrzanjima Vn.

Slika 4 - Principijelna šema inercijalnog sistema navigacije:
1 - žirostabilizovana platforma; 2 - pokazivač dužine; 3 - drugi integrator istočnog ubrzinja; 4 - računar; 5 - prvi integrator istočnog ubrzanja; 6 - ram; 7 - platforma sa akcelerometrima; 8 - istočni akcelerometar; 9 - severni akcelerometar; 10 - servomehannizam; 11 - prvi integrator severnog ubrzanja; 12 - drugi integrator severnog ubrzanja; 13 - pokazivač širine; 14 - časovnik; 15 - sumarni uredaj; 16 - servomehanizam rama
Drugi način pomoću koga se obezbeđuje horizontalnost i potrebna orijentacija po azimutu mernih osa akcelerometara sastoji se u tome što se akcelerometri postavljaju neposredno na žirostabilizovanu platformu (6) slika 5, koja je u tom slučaju stabilizovana u odnosu na ravan Zemljinog horizonta i pravac N-S.
Stavljanje u pogon inercijalnog sistema navigacije u principu se vrši na sledeći način:
Stabilizovana platforma se postavlja u horizontalni položaj a po azimutu tako da merna osa severnog akcelerometra bude usmerena jug-sever, čime se, takođe, orijentiše i istočni akcelerometar. Zatim se u računski uređaj unose geografske koordinate mesta sa koga je objekat poleteo kao i cilja na koji on treba doći, a integratori se postavljaju na nulu. Čim objekat krene, akcelerometri će početi da rade i šalju signale koji su neophodni za rad ovog sistema. Računari će neprekidno određivati: kurs, ugao nagiba i skretanje aviona, i u vidu signala slati na auto-pilot, pošto su isti neophodni za upravljanje letom.
Međutim, pređeno rastojanje koje se meri dvostrukim integralom od signala akcelerometara proporcionalno je kvadratu vremena, što za sobom povlači nedozvoljeno nagomilavanje grešaka u izračunavanju puta. To je nedostatak ovoga sistema, jer još ni do danas nije moguće izraditi akcelerometre, integratore i žiroskope sa takvom tačnošću koji bi otklonili nagomilavanje grešaka za dužeg vreme leta.
Praktično rešenje ovog problema kao i održavanje horizontalnog položaja žirostabilizovane platforme pokazalo se mogućim tek tada kada su se konstruktori inercijalnih sistema navigacije obratili ideji koju je 1923 god. izneo dr. Šuler. Ta ideja se zasniva na principu klatna, koje ima periodu klaćenja od 84,4 min. Ovaj princip predstavlja osnovu svih do sada poznatih i realizovanih inercijalnih sistema navigacije. On je omogućio da se tačno utvrdi pravac dejstva sile Zemljine teže (vertikala) na objektu koji se kreće, nezavisno od njegovih ubrzanja koja dejstvuju u bilo kojim pravcima, a isto tako i nezavisno od uzroka koji su ih izazvali. Ako nam platforma sa akcelerometrima predstavlja takvo klatno koje se odlikuje periodom klaćenja od 84,4 min, onda će ona neprekidno pratiti stvarnu vertikalu, a to znači da će akcelerometre postavljati uvek upravno na tu vertikalu.

Slika 5 - Žirostabilizovana platforma:
1 - telo objekta kojim se upravlja; 2 - izvršni organ servomehanizma za nagib; 3 - ram ose za nagib; 4 - žiroskopi; 5 - akcelerometri; 6 - stabilizovani ram; 7 - izvršni motor servomehanizma za tangaž; 8 - izvršni motor servomehanizma kursa
Osim toga, primena takvog principa garantuje da se neće nagomilavati nedozvoljene greške proračunskog položaja, koje bi se u protivnom pojavljivale zbog otklanjanja žiroskopa, neuravnoteženosti akcelerometara i instrumentalnih grešaka.
Za telo koje se kreće po površini zemlje ili koje leti nad zemljom na visini koja se može zanemariti u poređenju sa radijusom (R) zemlje, ta perioda je ravna:

Pri odgovarajućem izboru parametara svakog elementa ponaosob, može se postići da perioda sopstvenih oscilacija inercijalnog sistema bude ravna 84,4 mm. Kada se to postigne, onda je ovaj sistem u stanju, kao i klasično Šulerovo klatno, da nađe vertikalu mesta i sačuva taj položaj, ili će oscilovati u odnosu na taj položaj nezavisno od kretanja objekta. Prema tome, takav oscilatorni sistem neće skupljati greške proporcionalne kvadratu vremena, pošto i njihovo sakupljanje dobija oscilatorni karakter. To znači da će se i greška u proračunavanju rastojanja takođe kolebati u granicama periode od 84,4 min. Amplituda oscilacija će zavisiti tada samo od osetljivosti i tačnosti akcelerometara, žiroskopa, integratora i servo-mehanizma.
Međutim, pored napred iznetog, na rad inercijalnog sistema navigacije u izvesnoj meri će uticati i ubrzanje usled okretanja Zemlje, tj. takozvano Koriolisovo ubrzanje. Jer, kada se Zemlja ne bi okretala oko svoje ose, tada bi objekat koji leti po pravolinijskom kursu od ekvatora do severnog pola opisao pravolinijsku putanju u prostoru, kao što je to pokazano na slici 6. Ali, usled okretanja Zemlje, objekat koji leti duž meridijana, opisaće u stvarnosti u apsolutnom prostoru krivolinijsku maršrutu, kao što je to prikazano na slici 6. Takvu će je videti posmatrač koji se nalazi u prostoru nad polom, a koja svedoči o neprekidnoj promeni veličine i pravca brzine objekta u inercijalnom prostoru, kao i o prisustvu Koriolisovog ubrzanja. Radi kompenzacije toga uticaja, u izlazne signale akcelerometara N-S i E-W moraju se unositi odgovarajuće korekcije.
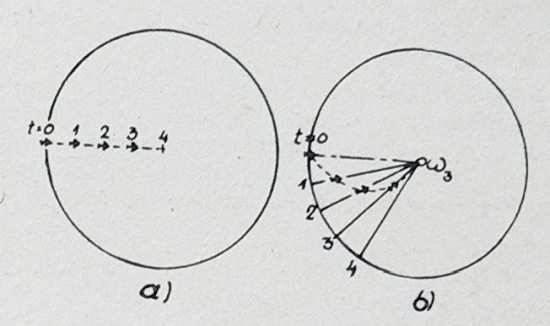
Slika 6 - Putanja objekta koji leti:
a) putanja u odnnosu na Zemlju; b) stvarna - apsolutna putanja
Nesferičnost Zemlje, takođe, donekle utiče na rad inercijalnog sistema navigacije. Jer, kada bi Zemlja bila sasvim sferičnog oblika, tada bi vertikalni pravac koji je utvrđen pomoću klatna sa periodom oscilacija od 84,4 min bio takođe vertikalan kao i linija koja ide od tačke na Zemljinoj površini do centra Zemlje. Međutim, kako Zemlja ima spljošten oblik, to se vertikalna linija toga neće poklapati sa linijom koja ide prema centru Zemlje.
Na geografskoj širini od 45° ugao između tih linija je ravan otprilike uglu koji odgovara 11 minuta. Iz ovoga se vidi da nepoklapanje tih linija stvara štetno ubrzanje. Sila inercije, koja je time uslovljena, dejstvovaće na akcelerometar N-S, tj. na severni akcelerometar. Prema tome, i taj se uticaj mora korigovati nekim uređajem, naročito kod inercijalnih sistema navigacije koji su predvideni za vazduhoplove (projektile) velikog doleta.
Zaključak
Iz napred navedenog se vidi da inercijalni sistem navigacije u svom čistom obliku, pored prednosti nad ostalim sistemima navigacije (a koje smo naveli u početku ovog napisa), ima i izvesne nedostatke, kao što su: skupljanje grešaka, uticaj Koriolisovog ubrzanja, usled nesferičnosti Zemlje, a koji zahtevaju dodatne uređaje, što opet sa svoje strane povlači za sobom poskupljenje i veće dimenziniranje čitavog sistema. U cilju otklanjanja tih nedostataka, inercijalni sistem navigacije se kombinuje sa drugim sistemima.
D. P.
Izvor: Vazduhoplovni glasnik, 60-te godine prošlog veka